
I am a Phd candidate, with the Institute of Robotics and Automatic Information System, College of Artificial Intelligence, and with the Tianjin Key Laboratory of Intelligent Robotics, Nankai University, Tianjin 300350, China.
My research directions are SLAM and 3D Reconstruction .
🔥 News
- 30 Jun 2026, Our paper LLF-GS SLAM is under review by TMM.
- 19 Mar 2025, Our paper RGBDS-SLAM has been published by RA-L 2025.
- 9 Oct 2024, I was selected for the China Association for Science and Technology's Young Talents Support Project for Doctoral Students (first batch nationwide), with a support period of 2 years.
- 6 Sep 2024, Our paper Survey of 3D GS has been published by Robot 2024.
- 6 Mar 2024, Our paper SemanticTopoLoop has been published by RA-L 2024.
- 13 Jul 2022, Our paper Object-Aware-SLAM has been published by RA-L and IROS 2022.
📝 Publications
👄 Main Paper
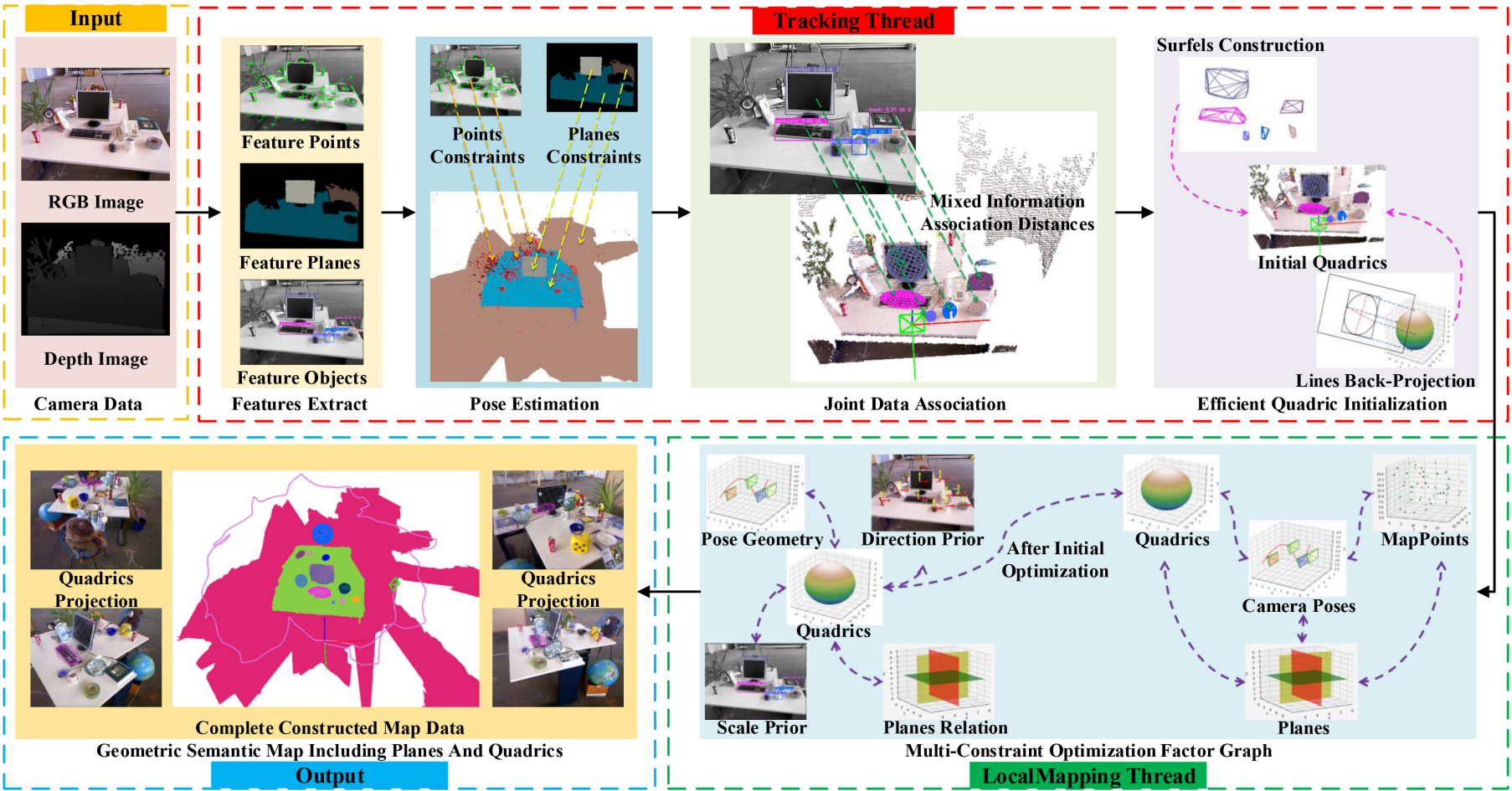
Object-Aware SLAM Based on Efficient Quadric Initialization and Joint Data Association, Zhenzhong Cao, Yunzhou Zhang, Rui Tian, Rong Ma, Xinggang Hu, Sonya Coleman, Dermot Kerr | Project
- We propose an efficient quadric initialization (EQI) method based on object detection and surfel construction which initializes quadrics using fewer frames with small viewing angles.
- We propose a robust object-level joint data association (JDA) method combining multi-dimensional information and statistic distributions.
- We propose a multi-constraint optimization factor graph for quadrics optimization and joint bundle adjustment.
- We implement a complete visual semantic SLAM system, aiming to build a novel object-oriented and semanticallyenhanced map for indoor robot interaction.

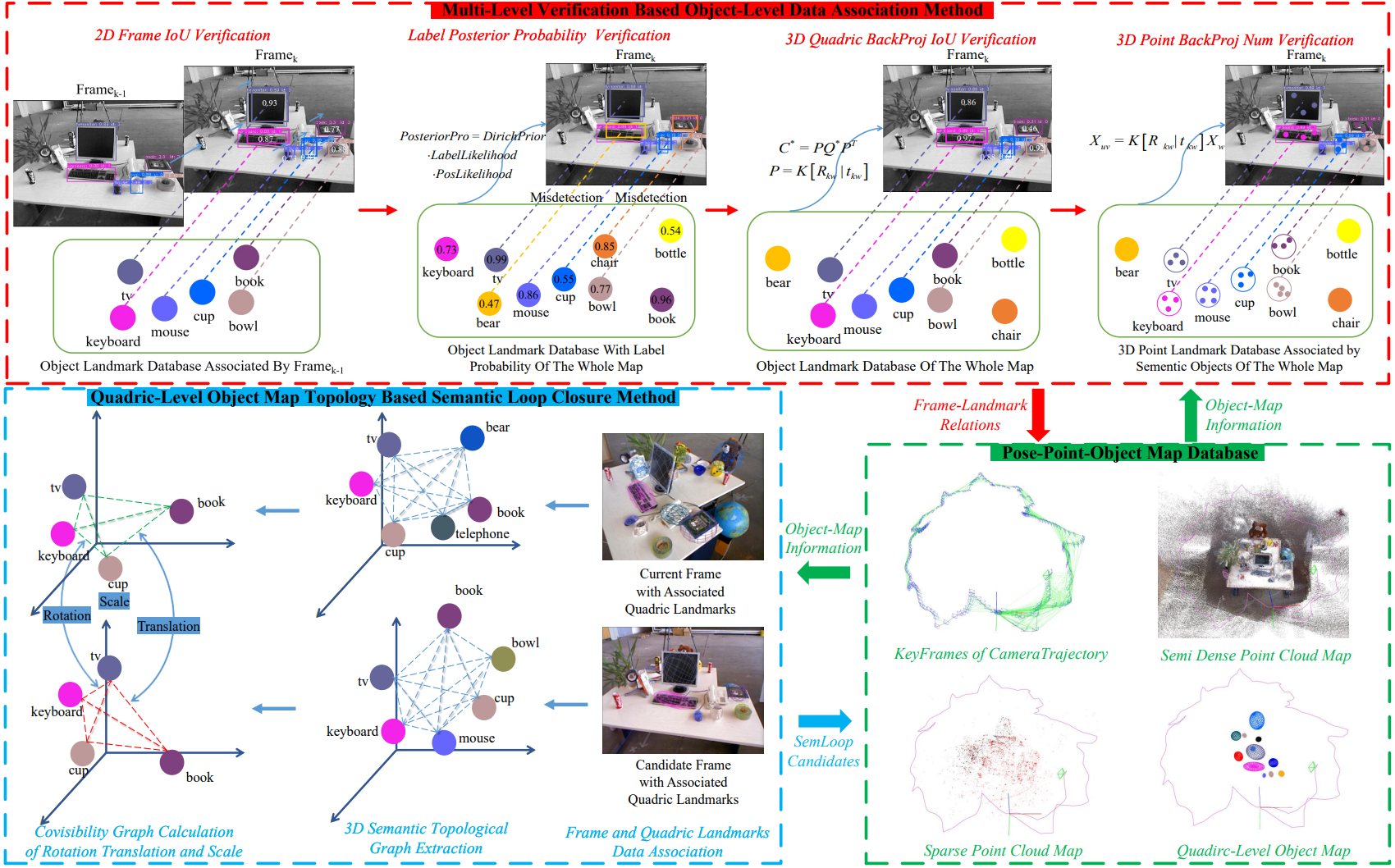
SemanticTopoLoop: Semantic Loop Closure With 3D Topological Graph Based on Quadric-Level Object Map, Zhenzhong Cao | Project
- MLV-ODA method is introduced to reduce the time and space complexity of data association, indirectly promoting the accuracy and completeness of object construction in the scene.
- QLT-SLC method is presented to improve the precision and recall rate of loop closure, as well as enhance the system’s localization accuracy.
- The proposed MLV-ODA method and QLT-SLC method are embed into the Object-Aware SLAM system, which jointly maintain the PPO-MD.
- Qualitative experiments, quantitative experiments, and ablation studies are designed to demonstrate the effectiveness and robustness of the proposed MLV-ODA and QLT-SLC method.
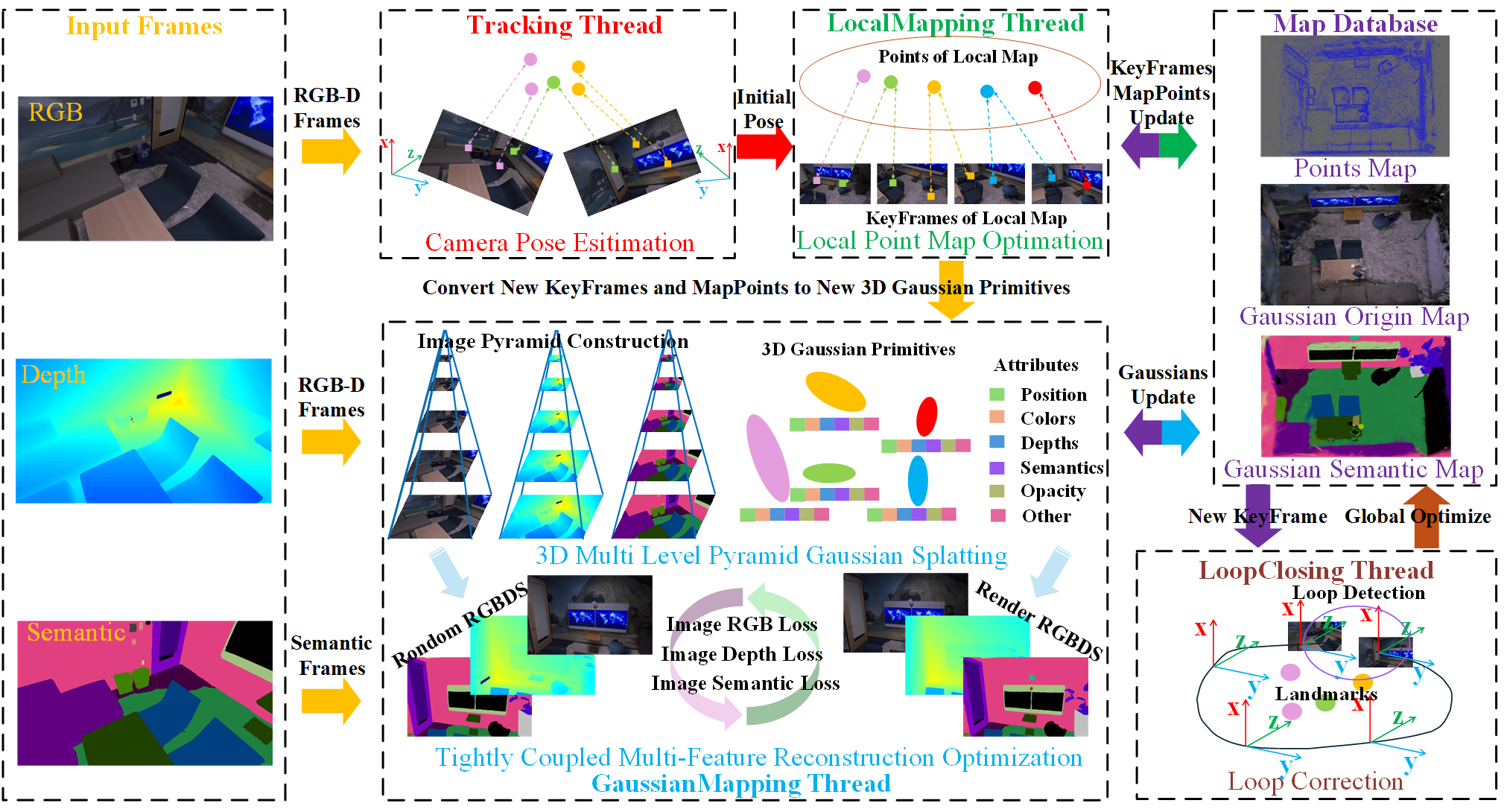
RGBDS-SLAM: A RGB-D Semantic Dense SLAM Based on 3D Multi Level Pyramid Gaussian Splatting, Zhenzhong Cao | Project
- We introduce a 3D Multi-Level Pyramid Gaussian Splatting (MLP-GS) method, which extracts multi-level image pyramids for Gaussian splatting training to restore scene details and ensure reconstruction consistency.
- We design a Tightly Coupled Multi-Features Reconstruction Optimization (TCMF-RO) mechanism to mutually boost RGB, depth, and semantic reconstruction accuracy during rendering optimization.
- We build a full RGB-D semantic dense SLAM system extended from ORB-SLAM3, supporting real-time high-fidelity joint reconstruction of color, depth and semantics.
- Experiments on Replica and ScanNet datasets surpass SOTA methods, with 11.13% PSNR and 68.57% LPIPS improvement; ablation experiments verify the effectiveness of two core modules.
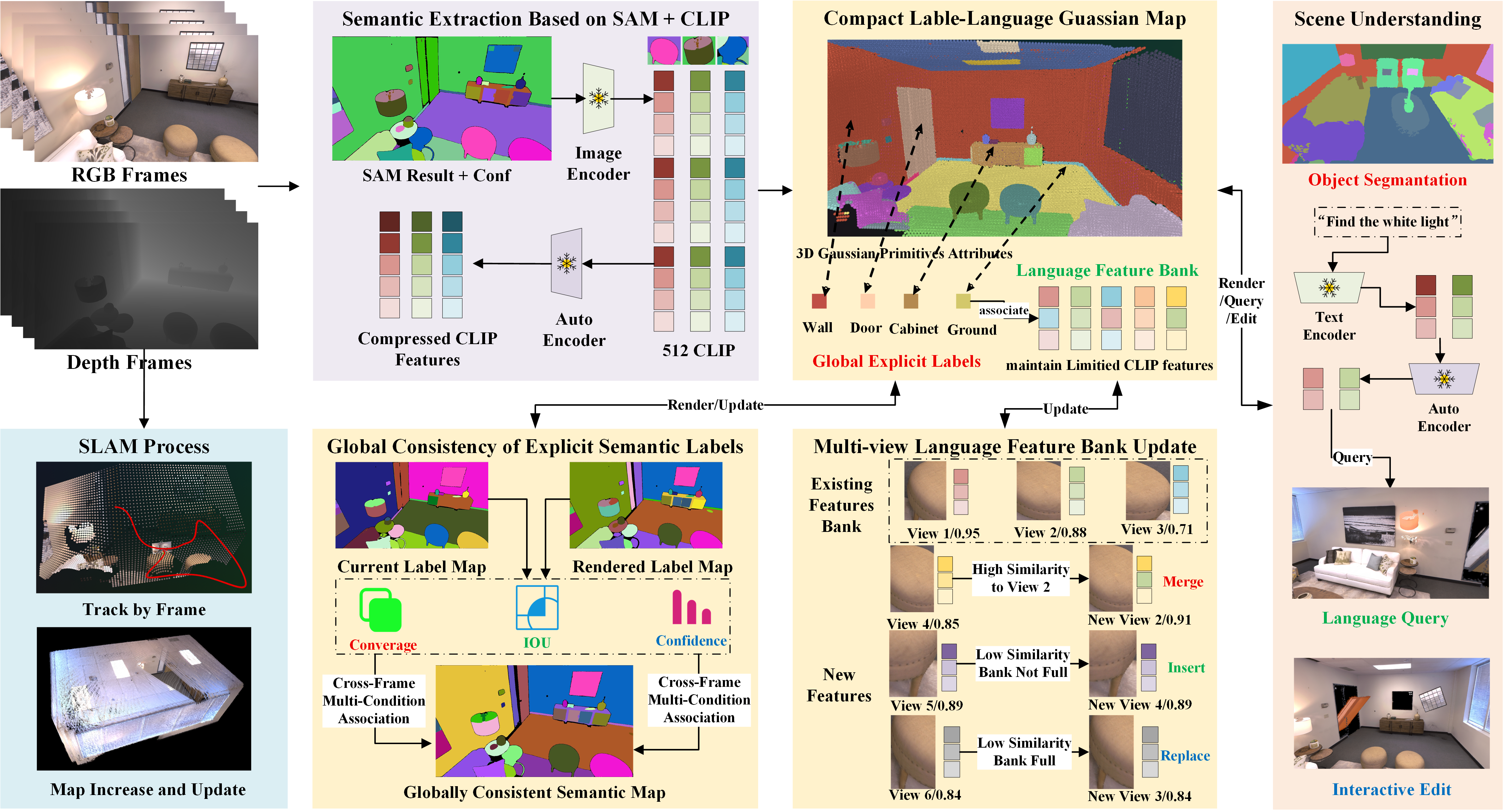
LLF-GS SLAM: Real-Time 3D Gaussian Semantic SLAM via Compact Label-Language Features, Zhenzhong Cao | Project
- We propose a label-language dual-branch semantic Gaussian representation: global consistent explicit labels act as object segmentation anchors, and each label stores a compact multi-view language feature bank for open-vocabulary query and editing.
- A global label consistency mechanism aligns per-frame SAM segmentation with rendered semantic maps to eliminate cross-view label fragmentation.
- We compress 512-dim CLIP features into 16-dim compact embeddings via offline autoencoder, and design quality-aware update rules for feature banks to save memory.
- The system runs in real time on low-memory GPUs, supporting open-vocabulary 3D object retrieval and interactive object editing; extensive experiments validate its superiority on Replica and TUM RGB-D.
📚 Co-Author Paper
RAL and ICRA 2022Accurate and Robust Object SLAM With 3D Quadric Landmark Reconstruction in Outdoors, Rui Tian, Yunzhou Zhang, Yonghui Feng, Linghao Yang, Zhenzhong Cao, Sonya Coleman, Dermot KerrICRA 2022SemLoc: Accurate and Robust Visual Localization With Semantic and Structural Constraints From Prior Maps, Shiwen Liang, Yunzhou Zhang, Rui Tian, Delong Zhu, Linghao Yang, Zhenzhong CaoIROS 2022CFP-SLAM: A Real-Time Visual SLAM Based on Coarse-to-Fine Probability in Dynamic Environments, Xinggang Hu, Yunzhou Zhang, Zhenzhong Cao, Rong Ma, Yanmin Wu, Zhiqiang Deng, Wenkai SunIROS 2022Semantic Topological Descriptor for Loop Closure Detection Within 3D Point Clouds in Outdoor Environment, Ming Liao, Yunzhou Zhang, Jinpeng Zhang, Zhenzhong Cao, Xiaoyu Zhao, Sonya Coleman, Dermot KerrTITS 2023Object SLAM With Robust Quadric Initialization and Mapping for Dynamic Outdoors, Rui Tian, Yunzhou Zhang, Zhenzhong Cao, Jinpeng Zhang, Linghao Yang, Sonya Coleman, Dermot Kerr, Kun LiTCSVT 2025DYO-SLAM: Visual Localization and Object Mapping in Dynamic Scenes, Xinggang Hu, Yanmin Wu, Mingyuan Zhao, Zhenzhong Cao, Xiangkui Zhang, Xiangyang JiIROS 2025ELPTNet: An Efficient LiDAR-Based 3D Pedestrian Tracking Network for Autonomous Navigation Social Robots, Jinzheng Guang, Zhenzhong Cao, Yinuo Song, Jingtai LiuESWA 2026HTMNet: A Hybrid Transformer-Mamba Network for LiDAR-Based 3D Detection and Semantic Segmentation, Jinzheng Guang, Shichao Wu, Yongru Wang, Zhenzhong Cao, Xiao Wu, Jingtai LiuTASE 2026PipeCLIP: Defect-Conditioned and Cross-Focus-Driven Vision-Language Model for Video-Based Sewer Defect Inspection, Chenyang Zhao, Chuanfei Hu, Zhenzhong Cao, Yinuo Song, Jingtai Liu
🎖 Honors and Awards
- 2017. 10, Provincial first prize in the National College Student Mathematics Competition
- 2018.10, Third Prize, University Intelligent Vehicle Competition
- 2019.10, Second Prize, University Programming Contest; Excellence Award, University Mathematics Competition
- 2020.09, Principal’s Scholarship
- 2021.10, First Class Academic Scholarship
- 2023.10, First Class Academic Scholarship, Outstanding Postgraduate Student Cadre
- 2024.10, First Class Academic Scholarship, Outstanding Postgraduate Student Cadre
- 2025.10, First Class Academic Scholarship, Outstanding Postgraduate Student Cadre
📖 Educations
- 2023.09 - today, Phd candidate, College of Artificial Intelligence, Nankai University, Tianjin.
- 2020.09 - 2023.06, Master, College of Control Science and Engineering, NorthEast Univeristy, Shenyang.
- 2016.09 - 2020.06, Undergraduate, College of Control Science and Engineering, NorthEast Univeristy, Shenyang.
- 2013.09 - 2016.06, Rizhao No.1 Middle School of Shangdong, Rizhao.
💬 Invited Talks
- 2022.10, Online oral presentation, IROS2022
💻 Internships
- 2022.06 - 2022.09, JD, Program development engineer, Beijing